日本 ONOSOKKI小野GPS矢量速度儀 LC-8220
如果您對該產品感興趣的話,可以
產品名稱: 日本 ONOSOKKI小野GPS矢量速度儀 LC-8220
產品型號: LC-8220
產品展商: ONOSOKKI小野
產品文檔: 無相關文檔
簡單介紹
日本 ONOSOKKI小野GPS矢量速度儀 LC-8220
日本 ONOSOKKI小野GPS矢量速度儀 LC-8220
日本 ONOSOKKI小野GPS矢量速度儀 LC-8220
的詳細介紹
日本 ONOSOKKI小野GPS矢量速度儀 LC-8220
特長
-
-
? GPS衛星以外GLONASS衛星信號也能使用對應
-
? 新型天線(LC-0721)體積小而薄,并重量輕,設置在車頂時,產生的空氣阻力以及對車輛行駛狀態的影響都非常小
-
? IMU(慣性測量單元)的角速度的直線性可由±0.1 %/F.S.提升為±0.03 %/F.S.(選配功能)
-
? 高速響應IMU模擬信號輸出功能可由100 Hz提升為500 Hz(選配功能)
-
? 新增加了白線檢測功能,加加速度測量功能,平均減速測量功能等選配功能
-
? 1臺可完成直進速度,橫向速度,側滑角,坡度等包括選配功能的30項目以上的測量分析(LC-8120包含部分選配功能)
-
? 模擬信號輸入8通道,脈沖信號輸入5通道(LC-8220為標配,LC-8120為選配)
-
? 在各種測量數據中可選擇,3軸加速度,傾斜角等16個數據的模擬信號輸出(LC-8220)
-
? 可讀取CAN的數據(選配功能)
-
? 衛星信號不足時可通過LED與提示聲進行狀態提示
-
? 具有可追蹤校準體系(具備可追蹤校準體系圖,試驗成績書,校準證明書)
-
? 加減速試驗等各種車輛試驗提供多種測試應用選配
-
? LC-8120通過增加選配功能可升級到LC-8220
-
-
高精度數據測
通常,GPS系統可測量經度及緯度數據,LC-8000系列不僅測量經度及緯度數據,并且通過由衛星傳來的信號波與移動物體間產生的多普勒效應,即可實現高精度測量移動物體的移動速度。
通過衛星信號波與移動物體間產生的多普勒效應,實現高精度測量速度與距離。
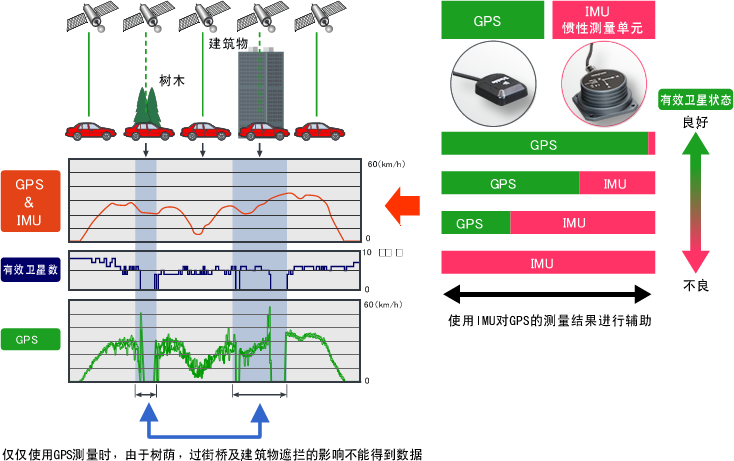
穩定測量
通常,使用GPS信號測量速度時,接受的衛星信號數影響其測量效果,LC-8000系列使用IMU慣性測量單元,可以消除衛星信號不足的影響進行穩定的測量。
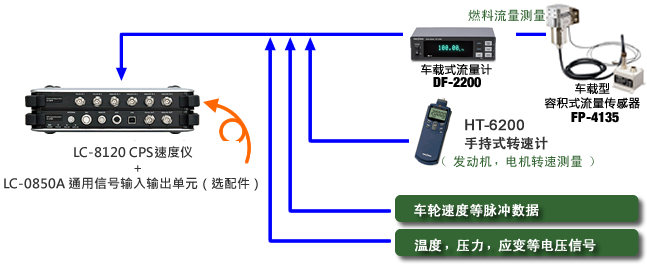
LC-8120

<LC-8120 + LC-0850A 通用信號輸入輸出單元的配套組合>
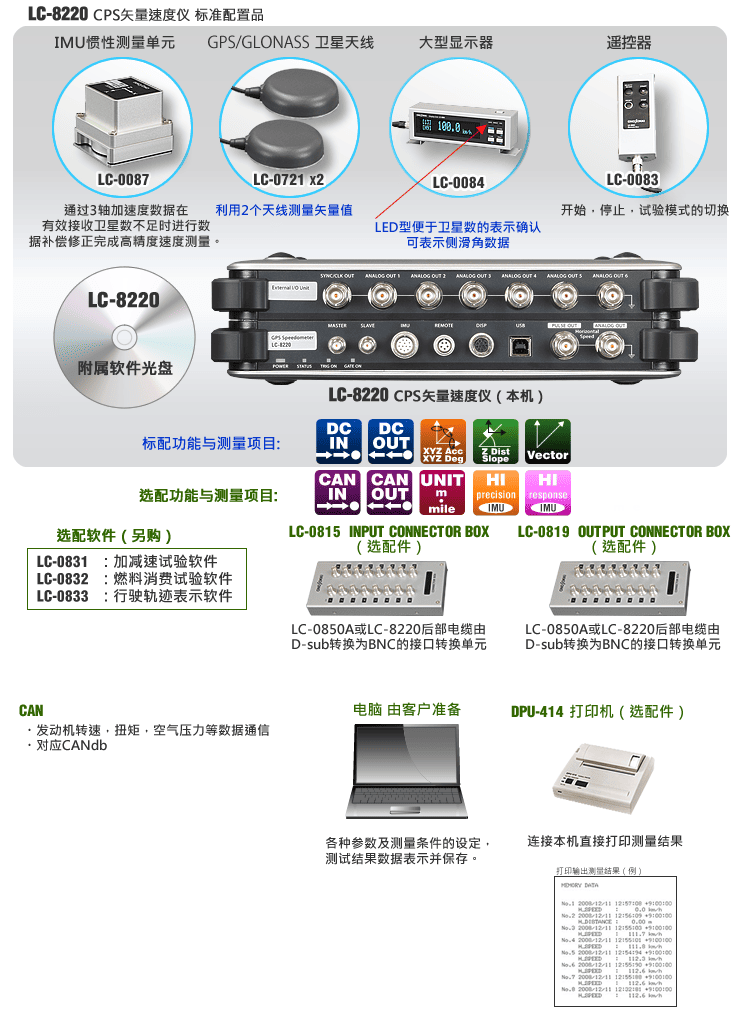
LC-8220
選配功能說明

模擬信號輸入8通道,脈沖信號輸入2通道以上。使用電腦可進行數據采集記錄。電壓量程0 ~ ±10 V,0 ~ ±20 V。在LC-8120系統中可配套選配件LC-0850A(信號輸入輸出單元)使用。
 本機測量的數據進行模擬電壓輸出的功能。輸出電壓*大10 V。可從多數測量數據中選擇16數據進行16通道輸出。另外速度信號配有專用模擬信號輸出接口。LC-8120需要配選配LC-0850A(信號輸入輸出單元)使用。
本機測量的數據進行模擬電壓輸出的功能。輸出電壓*大10 V。可從多數測量數據中選擇16數據進行16通道輸出。另外速度信號配有專用模擬信號輸出接口。LC-8120需要配選配LC-0850A(信號輸入輸出單元)使用。
※ ※ 圖片為LC-8220 上部模擬信號輸出可任意設定 下部模擬信號輸出為速度數據信號( 配)

LC-0851可以采集讀取CAN的通信數據。支持CAN Ver. 2.0B。*大32通道。為LC-8120,LC-8220的選配功能。

LC-0811A可將本機的測量數據通過CAN通信功能進行輸出。輸出周期*大10 ms。支持CAN Ver. 2.0B。設定的ID識別碼也可輸出至CANdb文件中。為LC-8120,LC-8220的選配功能。
 LC-0821(IMU慣性測量輸出功能)可以將IMU(慣性測量單元)的X,Y,Z軸方向加速度,角速度,角度信息等進行測量并輸出。LC-8120為選配功能。
LC-0821(IMU慣性測量輸出功能)可以將IMU(慣性測量單元)的X,Y,Z軸方向加速度,角速度,角度信息等進行測量并輸出。LC-8120為選配功能。

LC-0822(垂直方向測量)可以進行高度數據與IMU的Z軸方向數據測量,由此可以得出傾斜角數據。LC-8120為選配功能。
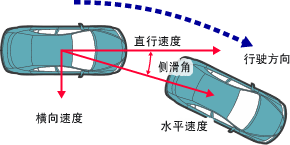
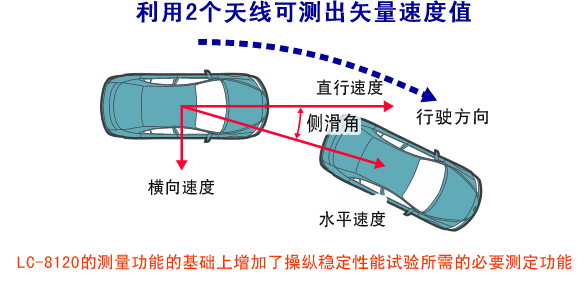
LC-0823 速度矢量測量功能,通過使用2個不同位置設置的天線,按行駛移動方向測量測量出直行,橫向速度。LC-8120為選配功能。

分析軟件內可選擇設定單位制式。
LC-0820測量數據單位制式選擇功能,測量數據的單位可選擇測定為km或mile制式。LC-8120與LC-8220均為選配功能。

可實現角速度的直線性為±0.03 %/F.S.以內的高精度測量。 (標配的IMU的直線性精度為±0.1 %/F.S.以內) LC-8120與LC-8220均為選配功能。

可實現500 kHz的高速響應測量。(標配的IMU的輸出頻率為100 Hz) LC-8120,LC-8220的標配IMU(EC-0087)與選配高精度IMU(LC-0855)都可配套使用(選配功能)。
配軟件(版本3)特長

![Oscope[時系列データ解析ツール]への転送が簡単に](https://www.onosokki.co.jp/CHN/hp_c/products/keisoku/vehicle/images/lc_soft3c.png)
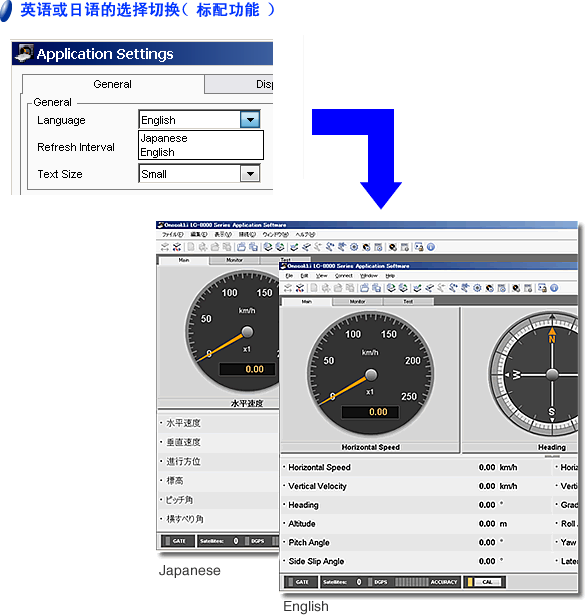
選配軟件(版本3)特長
軟件功能分類
LC-8120/LC-8220功能比較表
○: 準 △: 選配 X: 不可
※1 LC-0823 矢量速度測量功能追加測量可能。
※2 LC-0822 垂直方向測量功能追加測量可能。
※3 LC-0821 IMU數據輸出功能追加測量可能。
※4 LC-0821 IMU數據輸出功能與LC-0823 矢量速度測量功能追加測量可能。
※5 使用1個天線不能測量。
※6 LC-0871加加速度測量功能追加測量可能。
規格
選配件品
其他選配件
●為了提高性能,可能不經預告而變更外形及規格,請諒解。
